机器人技术一直是人类探索的重要方向之一,机器人手的研究也是机器人技术中的一个重要领域。在这个领域中,剑桥大学的研究人员近日开发出了一种成本效益和节能的机器人手,可以抓取各种形状、大小和质地的物体,并可以通过手腕运动和“皮肤”中的感觉来控制。
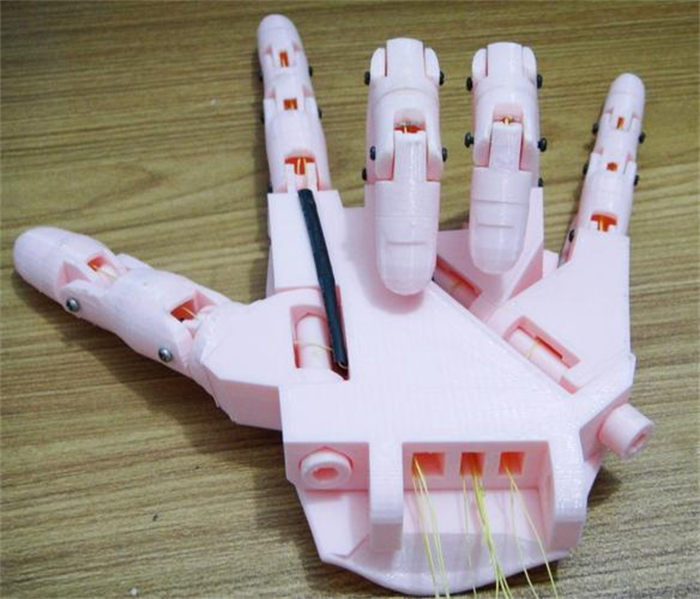
机器人手的研究一直是一个具有挑战性的课题,因为人类的手是高度复杂的,而机器人手需要具备相应的灵巧性和适应性。为了解决这个问题,研究人员使用了3D打印技术,创建了一只灵活的机器人手,虽然它的手指不能独立移动,但仍可以进行一系列复杂的运动。

这只机器人手具有被动运动的特点,这使得机器人更容易控制,并且比具有完全机动化手指的机器人更加节能。研究人员表示,这种机器人手的适应性设计可以用于开发低成本的机器人,这些机器人可以进行更自然的运动,并能学会抓取广泛的物体。
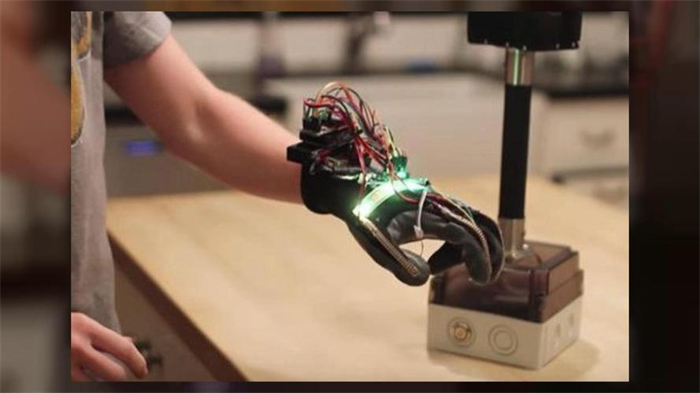
研究人员使用了植入触觉传感器的3D打印拟人手,以便该手能够感知它所接触的东西。该手只能够进行被动的、基于手腕的运动。研究小组对这只机器人手进行了1200多次测试,观察其抓取小物体而不掉落的能力。在完成对球的训练后,它又尝试抓取不同的物体,包括一个桃子、一个电脑鼠标和一卷气泡膜。在这些测试中,这只手能够成功抓取14个物体中的11个。机器人手使用的传感器可以测量施加在物体上的压力,就像机器人的皮肤一样。研究人员表示,机器人学会了一个特定的运动和一组特定的传感器数据的组合将导致失败,这使得它成为一个可定制的解决方案。这只手非常简单,但它可以用同样的策略拿起很多物体。
研究人员指出,一个完全驱动的机器人手需要大量的能量,同时也是一个复杂的控制问题。而剑桥大学设计的手的被动设计,使用少量的传感器,更容易控制,提供广泛的运动范围,并简化了学习过程。未来,该系统可以通过增加计算机视觉功能或教机器人利用其环境,使其能够抓取更广泛的物体。这项研究的结果已在《高级智能系统》杂志上发表。